Modular research and development platform for
collaborative mobile robotics and
human-robot interaction
Year-End Sale! Enjoy 10% off KELO products and cobot arms until Dec. 31, 2025 (other third-party items excluded)!
Not ready to order now? Universities can reserve the discount with a non-binding purchase option until Mar 31, 2026.

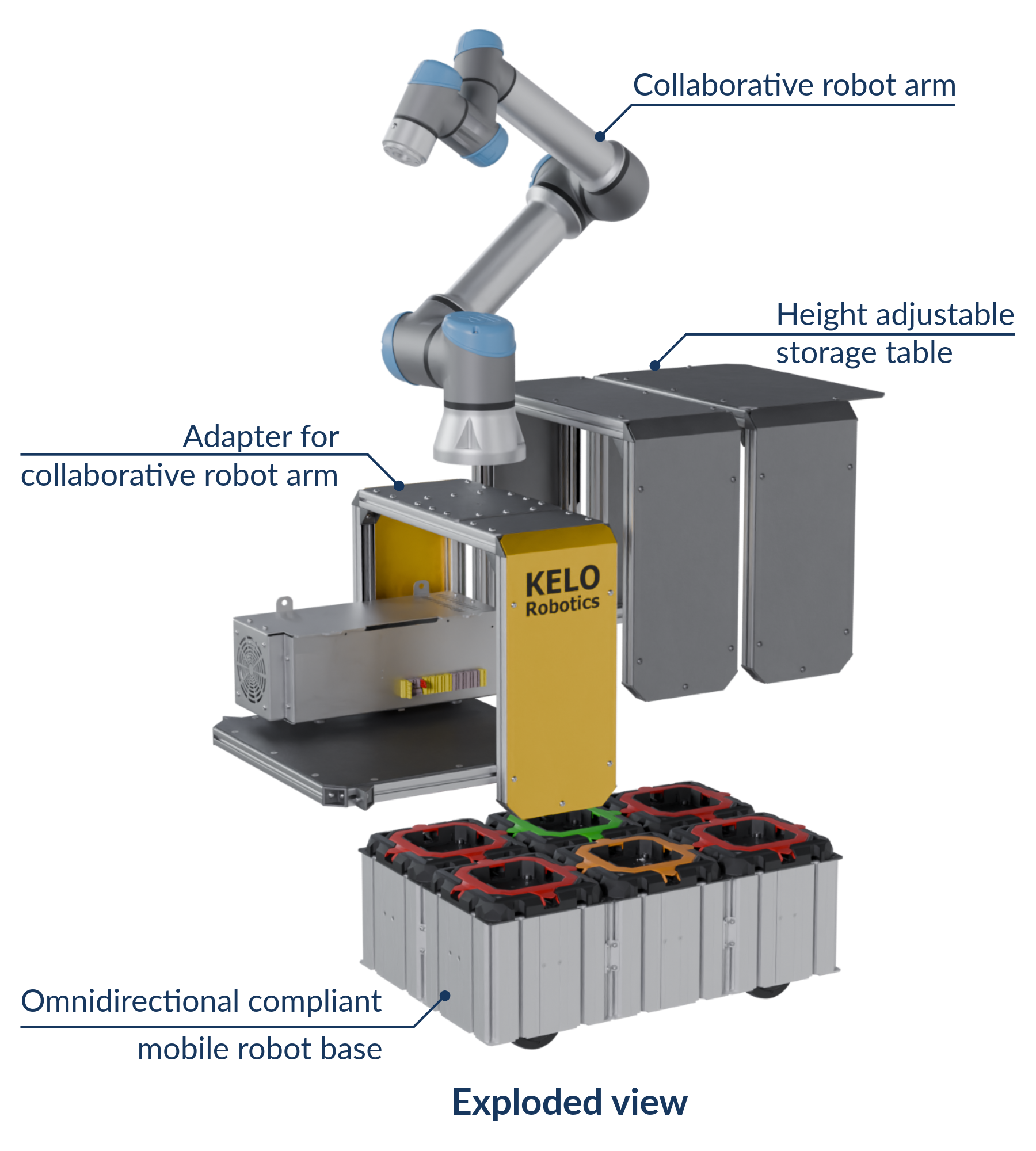
Mobile base for a collaborative mobile manipulator
| Model | |||||
|---|---|---|---|---|---|
 | 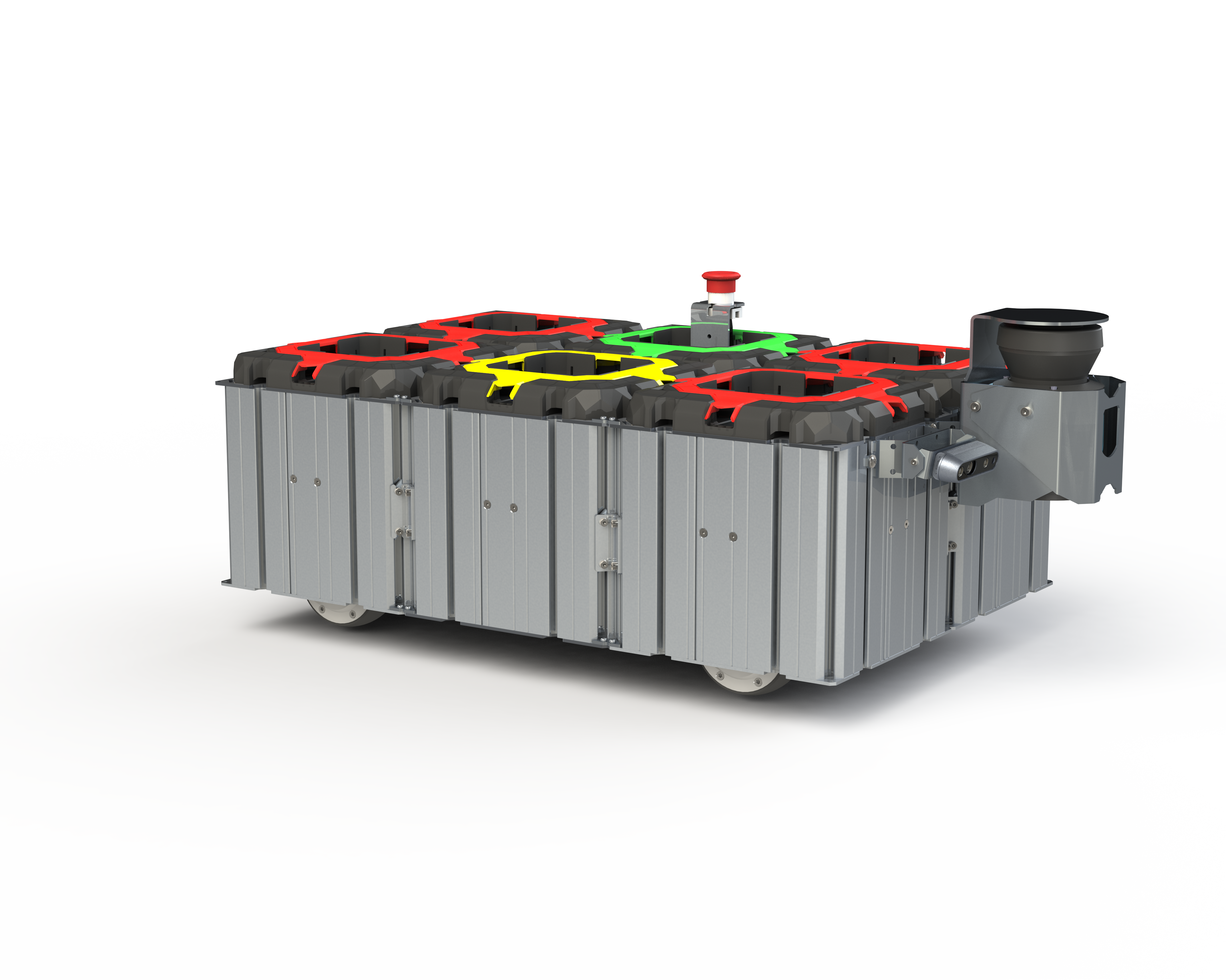 | ||||
| Drives | + 2 passive swivel wheels■■ | ||||
| Maneuverability | |||||
| Compliance to external forces | |||||
| Configurability | |||||
| Expandability | |||||
| Onboard CPU | |||||
| Power supply | |||||
| Battery runtime | |||||
| Payload | |||||
| Max velocity | |||||
| Footprint | |||||
Manufacturer: KELO Robotics
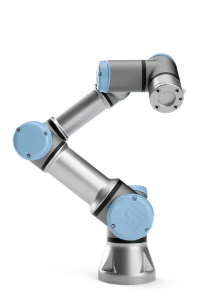
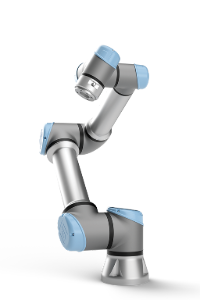
| Model | |||
|---|---|---|---|
 |  |  |
|
| DOF | |||
| Payload | |||
| Weight | |||
| Reach | |||
| Pose repeatability per ISO 9283 | |||
| Control box | |||
Extensions

| Bridge | Specifications |
|---|
| Frame made from standard aluminum profile |
| Height-adjustable |
| Easy mounting |

| Bridge cover | Choices |
|---|
| Storage table with rubber pad |
| Mounting plate for sensor |

| Arm adapter | Specifications |
|---|
| Height-adjustable bridge enforced by a steel plate for mounting arm |
| Power adapter for controller box |
| Height-adjustable tray holding the controller box. |
Configurations of collaborative mobile manipulators
 |  |
Note: The offered integrated system comes without an end effector. Please contact us for specific requests. |
|
The arm control box communication port is connected to the ROBILE PC. |
|
Integrator: KELO Robotics
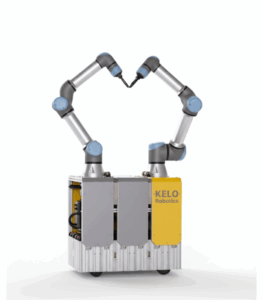
Mobile manipulator variations

Four-wheel configuration with dual UR5e arms

Four-wheel configuration with a single UR8 Long arm
Software
Open source (ROS-based)
All software is available for ROS1 and ROS2
KELO Tulip
- Velocity-based platform controller
- Standard cmd_vel interface
- Configurable for any number of KELO Drives
ROS Navigation (NAV2 Stack)
- Robot navigation with global and local path planning
- Obstacle avoidance
- Tutorial for usage with ROBILE platforms
ROS2 MoveIt (vendor-specific)
- Motion planning for manipulators
- Inverse kinematics, control and collision avoidance
- Tutorial for usage of collaborative robot (see manufacturer’s manual)
ROBILE Simulation (ROS2 version is currently being tested)
- Models for Gazebo simulator
- Simulation of any ROBILE Brick configuration
- Visualizations in RViz
Proprietary software
Force-torque-based controller for compliant motion of mobile base
- Configurable for any number of KELO Drives
- Compatible with standard ROS cmd_vel interface
