Integrated suspension
Continuous 360° rotation
| General specifications | |
|---|---|
| Power | 1000 W |
| Rated torque | 30 Nm |
| Peak torque | 60 Nm |
| Velocity range | 0-2 m/s |
| Motor type | Gearless EC motor – backdrivable |
| Kinematics | differentially driven twin-wheels |
| Software compatibility | KELO TULIP, various EtherCAT master software stacks |
| Firmware update | Via EtherCAT |
| Mechanical specifications | |
|---|---|
| Payload | 500 Kg |
| Weight | 15.5 Kg |
| Protection class | IP65 |
| Tire material | Polyurethane (PU) |
| Hub motor | Ø 165 mm |
| Suspension system | ±7.5° (24 mm vertical) movement with integrated rubber damper in the drive |
| Rotation axis | Continuous 360° rotation without mechanical limit – 15 mm off-axis wheel for enhanced stability and backdrivability |
| Space requirement | Cylindrical part: Ø 320 mm × 205 mm, top 79 mm chamfered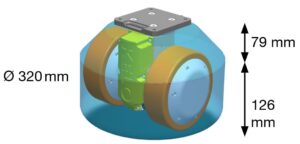 |
| Safety | |
|---|---|
| Input signal | 2xOSSD, FSoE1 |
| Standard safety functions (1) | STO, SS1 according to SIL2 PLd |
| Electrical specifications | |
|---|---|
| Power supply | 48 VDC (Max.: 65 V) |
| Controller features | |
| Modes | Velocity control / Current (torque) control |
| Controller | FOC / PID |
| Loop frequency | Command Frequency: 1 kHz | Inner Loop Frequency: 20 kHz (current/velocity control) |
| Communication interface | |
| EtherCAT | EtherCAT Slave, FSoE (1) |
| CAN | CAN over EtherCAT (CoE) – DS402 |
| OSSD | 2x OSSD signals |
| Inputs | |
| Velocity command (in velocity mode) | Each hub motor: 0–2 m/s command with 3 mm/s resolution |
| Current command (in current mode) | Each hub motor: max. 22 A with 0.01 A resolution. |
| Velocity limit (in current mode) | Each hub motor: 0–2 m/s command with 3 mm/s resolution |
| Current limit (in velocity mode) | Each hub motor: max. 22 A with 0.01 A resolution. |
| E-Stop | 2x OSSD signals, FSoE (1) |
| Outputs | |
| Velocity data | Each hub motor: 1 mm/s resolution Rotation axis: 0.001 °/s resolution |
| Position data | Each hub motor: 0.1 ° resolution Rotation axis: Absolute position with 0.001 ° resolution |
| Current data | Each hub motor: 0.01 A resolution Drive current consumption: 0.01 A resolution |
| Voltage data | Drive input Voltage: 0.02 V resolution |
| Additional data | E-Stop, temperature, warnings, errors, timestamps, etc. (please refer to the datasheet). |
| Connector | |
| KELO EasyConnect | |
(1) Available on safety certified versions
